Subspace
A subspace of a vector space is a subset that is itself a vector space under the same operations. It must satisfy three conditions:
- Contains the origin:
- Closed under addition: if , then
- Closed under scalar multiplication: if and , then
Examples
- In : any line or plane through the origin is a subspace
- In : a plane not through the origin is not a subspace
A subspace always passes through the origin. If it doesn’t, it is called an affine subspace.
An affine subspace is a shifted (translated) version of a subspace. It has the form:
where is a subspace and is a fixed offset vector.
Hyperplane
A hyperplane is a flat geometric object of dimension inside an -dimensional space. It is the most natural way to “cut” a space into two parts with a single boundary.
Formally, a hyperplane is the set of all points satisfying a single linear equation:
or in vector form:
where:
- is the normal vector
- is a scalar constant
- is any point on the hyperplane
| Ambient space | Hyperplane is a… |
|---|---|
| Line | |
| Plane | |
| -dimensional flat surface |
Geometric Interpretation
The vector is perpendicular (normal) to the hyperplane. Every point on the hyperplane has the same dot product with :
This is what defines the hyperplane geometrically: it is the level set of the linear function .
Dividing space into two half-spaces :
A hyperplane splits into exactly two half-spaces:
“half-space” means two separated regions — it does not imply equal volume or measure.
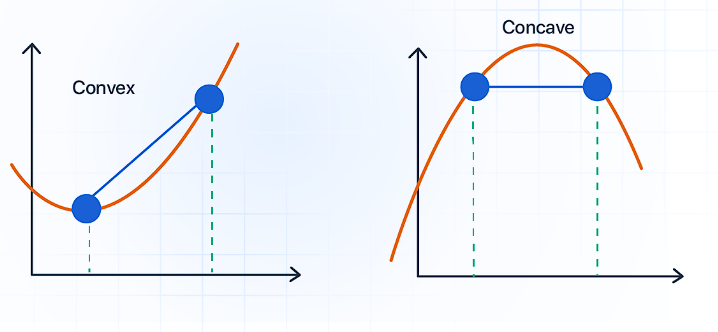
Convex Set
A set is convex if for any two points in the set, the entire line segment connecting them also lies in the set.
Formally, is convex if:
The expression is called a convex combination of and . As varies from to , it traces the straight line segment from to .
Intuition
A set is convex if you can “see” every point from every other point without leaving the set — no dents, holes, or concavities.
Half-spaces
A half-space is one side of a hyperplane in an n-dimensional space.
Formally, a (closed) half-space is:
where:
- ,
The hyperplane boundary is:
There is also the open half-space:
Half-spaces are always convex sets.
A half-space is defined as:
( = Positive class region)
(The argument works identically for .)
Proof
Take any two points . By definition:
Now take any convex combination with . We need to show , i.e., .
Since and , and , , :
Therefore , so .
The proof works because the dot product is a linear function, and linear functions preserve convex combinations:
A half-space is just the sublevel (or superlevel) set of a linear function and sublevel sets of linear (and more generally, convex) functions are always convex. If two points satisfy a linear inequality, every convex combination also satisfies it
Any convex polyhedron = intersection of finitely many half-spaces
A hyperplane can be written as:
Since both half-spaces are convex, and the intersection of convex sets is always convex, a hyperplane is also convex.
General rule: The intersection of any collection of convex sets is convex.
This is a powerful fact — it means any region defined by a finite number of linear inequalities (a polyhedron) is convex, since it is an intersection of half-spaces.
Convex Hull
The convex hull is the smallest convex shape that encloses all points.
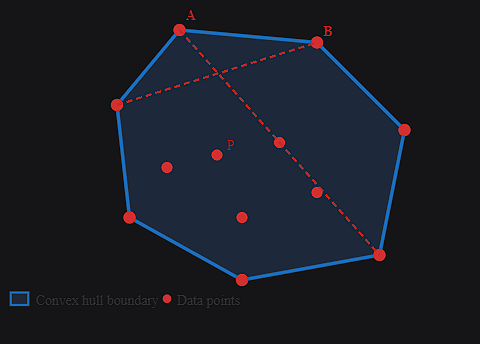
A convex polyhedron is mathematically defined as the intersection of a finite number of half-spaces.